SICK
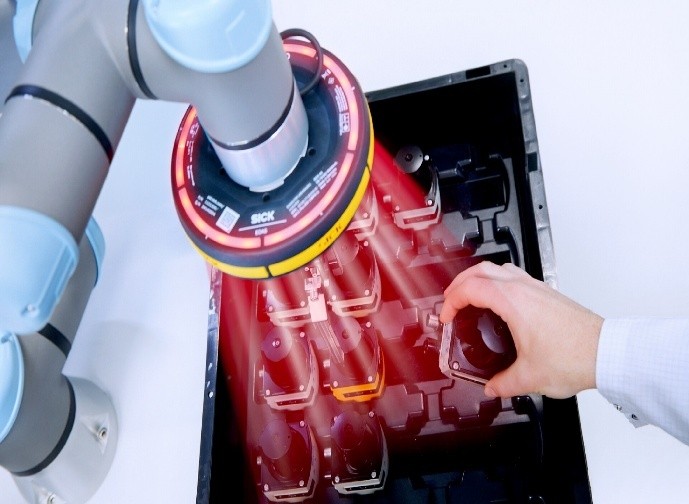
END-OF-ARM-SAFEGUARD – GIẢI PHÁP BẢO VỆ ĐẦU GẮP ROBOT AN TOÀN TỪ SICK
END-OF-ARM-SAFEGUARD – GIẢI PHÁP BẢO VỆ ĐẦU GẮP ROBOT AN TOÀN TỪ SICK (End-of-Arm-Safeguard –
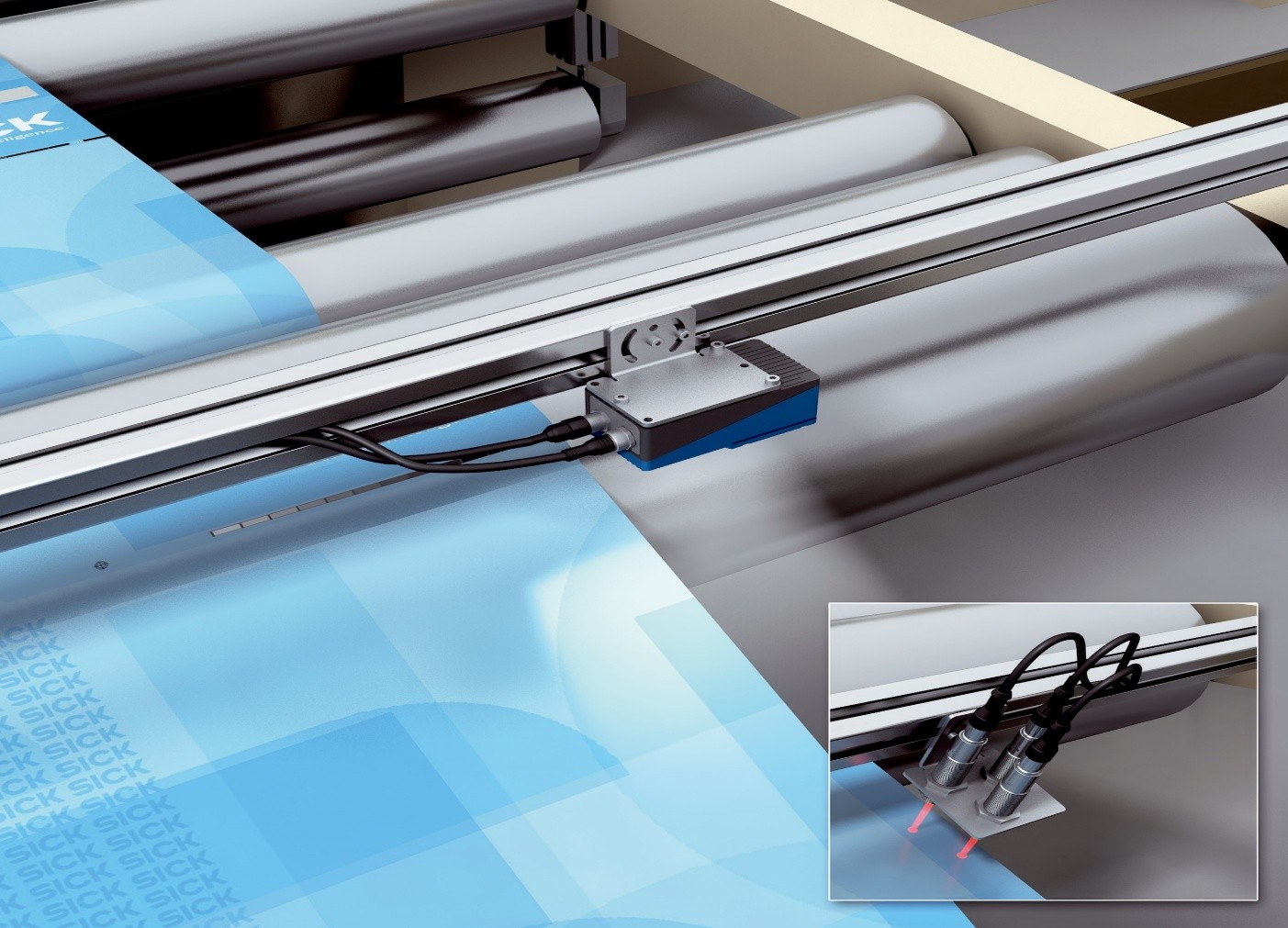
GIẢI PHÁP DẪN BIÊN CHÍNH XÁC VỚI CẢM BIẾN QUANG SICK CHO NGÀNH MÀNG PHIM VÀ VẬT LIỆU CUỘN
GIẢI PHÁP DẪN BIÊN CHÍNH XÁC VỚI CẢM BIẾN QUANG SICK CHO NGÀNH MÀNG PHIM

GIẢI PHÁP ĐO ĐỘ RỘNG VÀ ĐIỀU KHIỂN BIÊN VẢI BẰNG CẢM BIẾN QUANG TRỤ SICK V180-2
GIẢI PHÁP ĐO ĐỘ RỘNG VÀ ĐIỀU KHIỂN BIÊN VẢI BẰNG CẢM BIẾN QUANG TRỤ

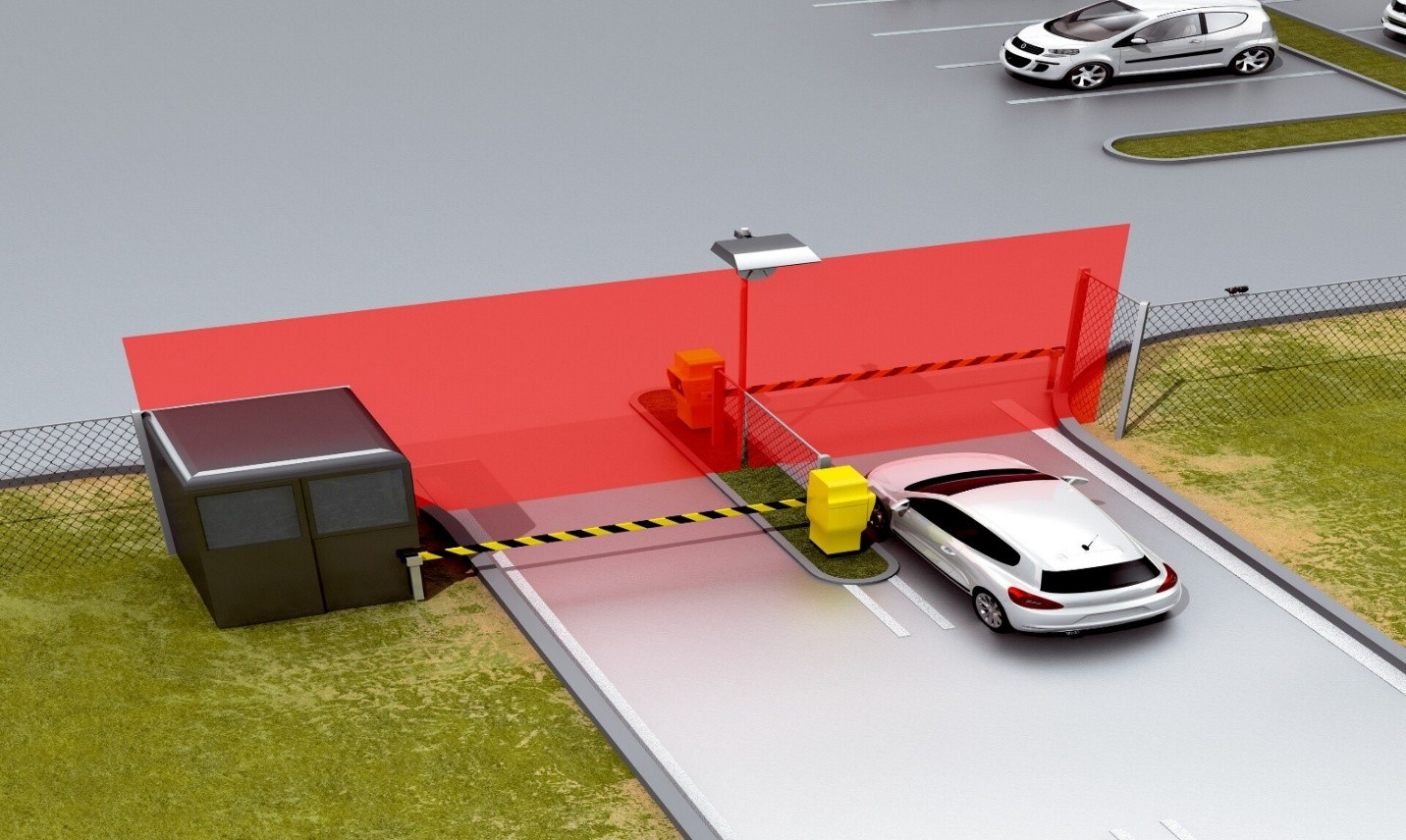
GIẢI PHÁP BẢO VỆ TRÁNH VA CHẠM TẠI RÀO CHẮN BẰNG CẢM BIẾN QUANG AN TOÀN SICK L27
GIẢI PHÁP BẢO VỆ TRÁNH VA CHẠM TẠI RÀO CHẮN BẰNG CẢM BIẾN QUANG AN

GIẢI PHÁP TRÁNH VA CHẠM TRONG NHÀ CHỨA MÁY BAY BẰNG CẢM BIẾN LIDAR 2D SICK
GIẢI PHÁP TRÁNH VA CHẠM TRONG NHÀ CHỨA MÁY BAY BẰNG CẢM BIẾN LIDAR 2D
GIẢI PHÁP CHỐNG VƯỢT RÀO (ANTI-CLIMB PROTECTION) CHO BARRIER VỚI CẢM BIẾN 2D LIDAR SICK
GIẢI PHÁP CHỐNG VƯỢT RÀO (ANTI-CLIMB PROTECTION) CHO BARRIER VỚI CẢM BIẾN 2D LIDAR SICK
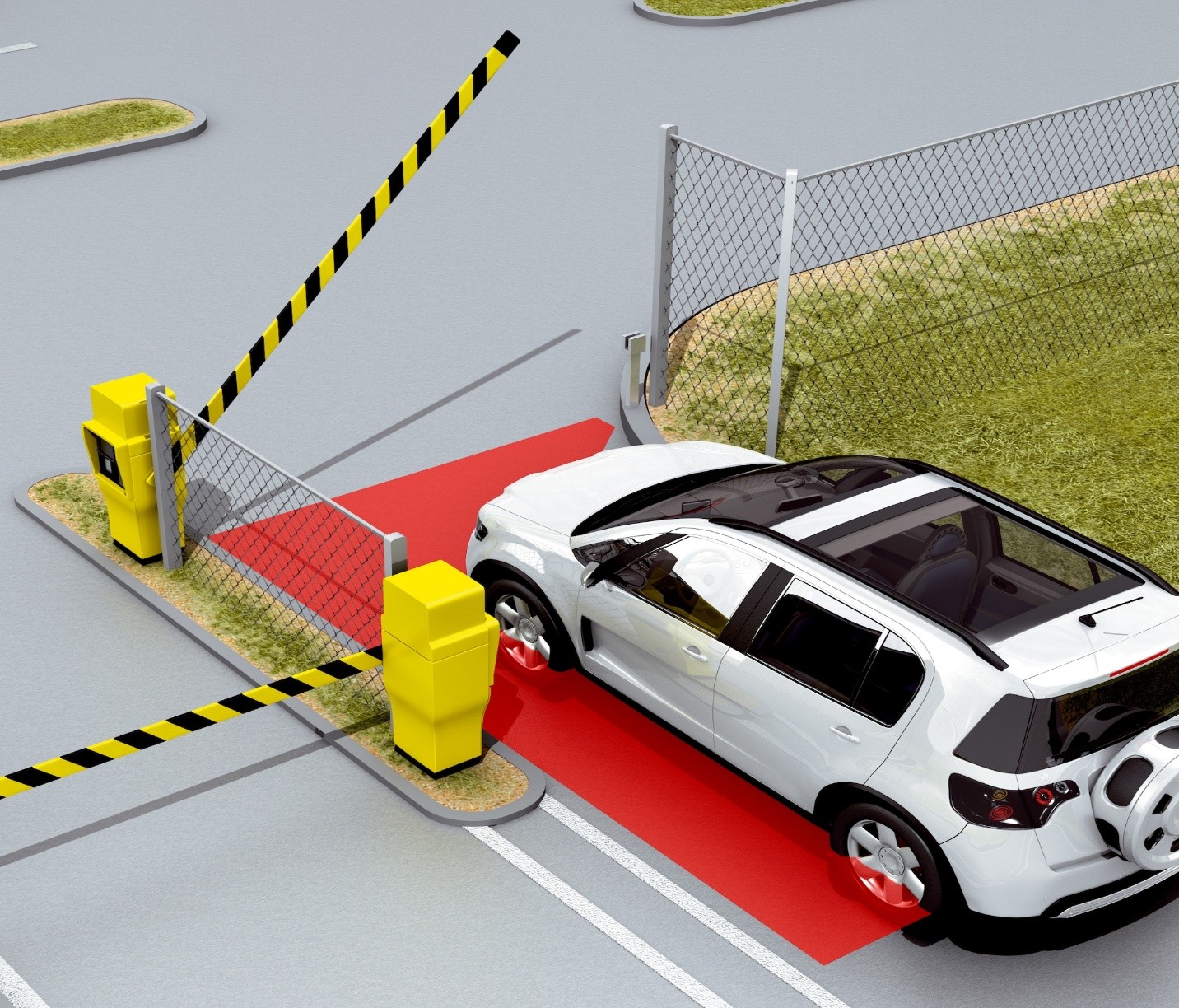
GIẢI PHÁP ĐIỀU KHIỂN RÀO CHẮN BẰNG CẢM BIẾN LIDAR 2D TỪ SICK
GIẢI PHÁP ĐIỀU KHIỂN RÀO CHẮN BẰNG CẢM BIẾN LIDAR 2D TỪ SICK (Controlling barriers

GIẢI PHÁP GIÁM SÁT CHỐNG TRÈO TẠI CỔNG LÊN MÁY BAY TỰ ĐỘNG TỪ SICK
GIẢI PHÁP GIÁM SÁT CHỐNG TRÈO TẠI CỔNG LÊN MÁY BAY TỰ ĐỘNG TỪ SICK
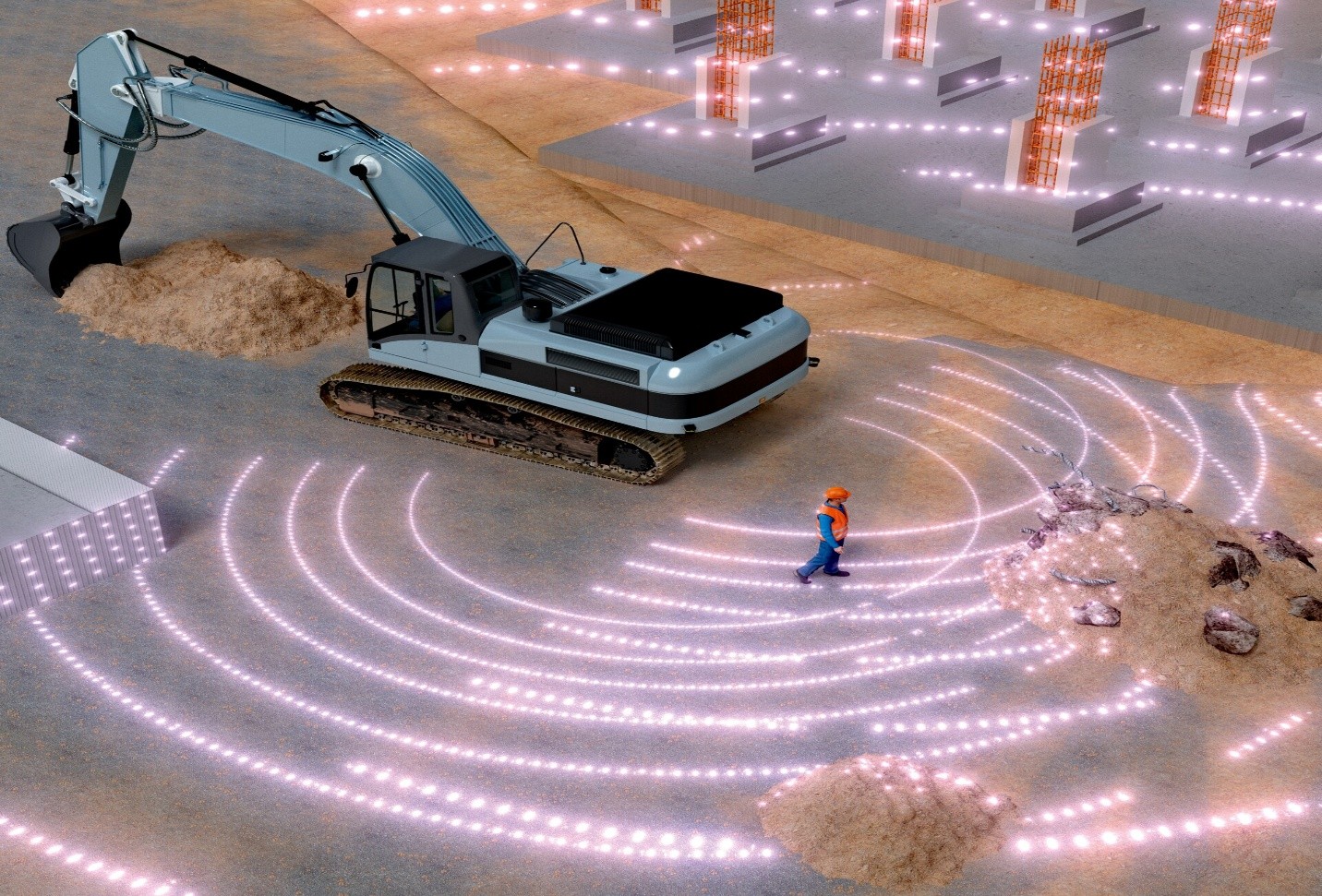
GIẢI PHÁP TRÁNH VA CHẠM CHO MÁY MÓC DI ĐỘNG TỪ SICK
GIẢI PHÁP TRÁNH VA CHẠM CHO MÁY MÓC DI ĐỘNG TỪ SICK (Collision avoidance for

AN TOÀN ĐỘNG
AN TOÀN ĐỘNG Tiềm năng tự động hóa mới nhờ định vị an toàn An

