SICK

GIẢI PHÁP GIÁM SÁT AN NINH VÀ PHÁT HIỆN VẬT THỂ TỐC ĐỘ CAO
CẢM BIẾN LIDAR 2D SICK LMS1000 – GIẢI PHÁP GIÁM SÁT AN NINH VÀ PHÁT

CẢM BIẾN LIDAR 3D MULTISCAN100-S – GIẢI PHÁP AN TOÀN CHO ROBOT VÀ XE TỰ HÀNH NGOÀI TRỜI
CẢM BIẾN LIDAR 3D MULTISCAN100-S – GIẢI PHÁP AN TOÀN CHO ROBOT VÀ XE TỰ
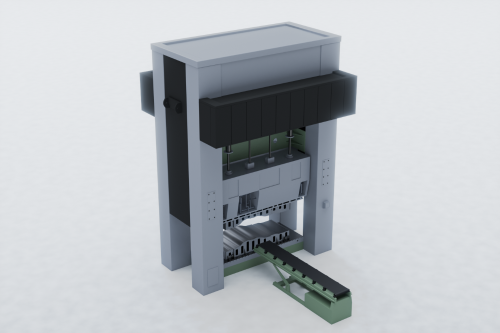
GIẢI PHÁP CẢM BIẾN IFM CHO MÁY DẬP KIM LOẠI
GIẢI PHÁP CẢM BIẾN IFM CHO MÁY DẬP KIM LOẠI (STAMPING PRESS) Trong sản xuất
CẢM BIẾN ĐO KHOẢNG CÁCH OD1000 – GIẢI PHÁP TỐI ƯU CHO ĐO LƯỜNG CHÍNH XÁC VÀ ỔN ĐỊNH TRONG SẢN XUẤT
CẢM BIẾN ĐO KHOẢNG CÁCH OD1000 – GIẢI PHÁP TỐI ƯU CHO ĐO LƯỜNG CHÍNH

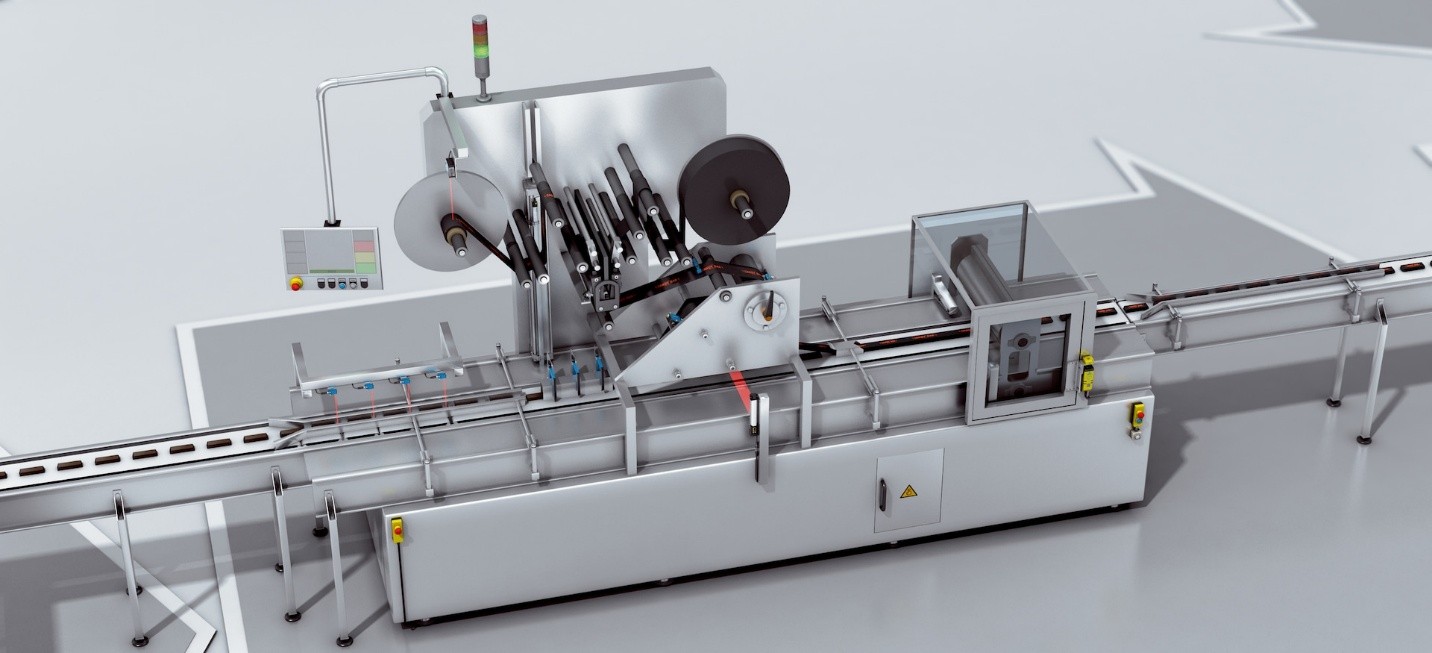
GIẢI PHÁP BẢO VỆ QUYỀN TRUY CẬP TRÊN ĐƯỜNG DÂY BÁO CHÍ
GIẢI PHÁP BẢO VỆ QUYỀN TRUY CẬP TRÊN ĐƯỜNG DÂY BÁO CHÍ Trong các dây
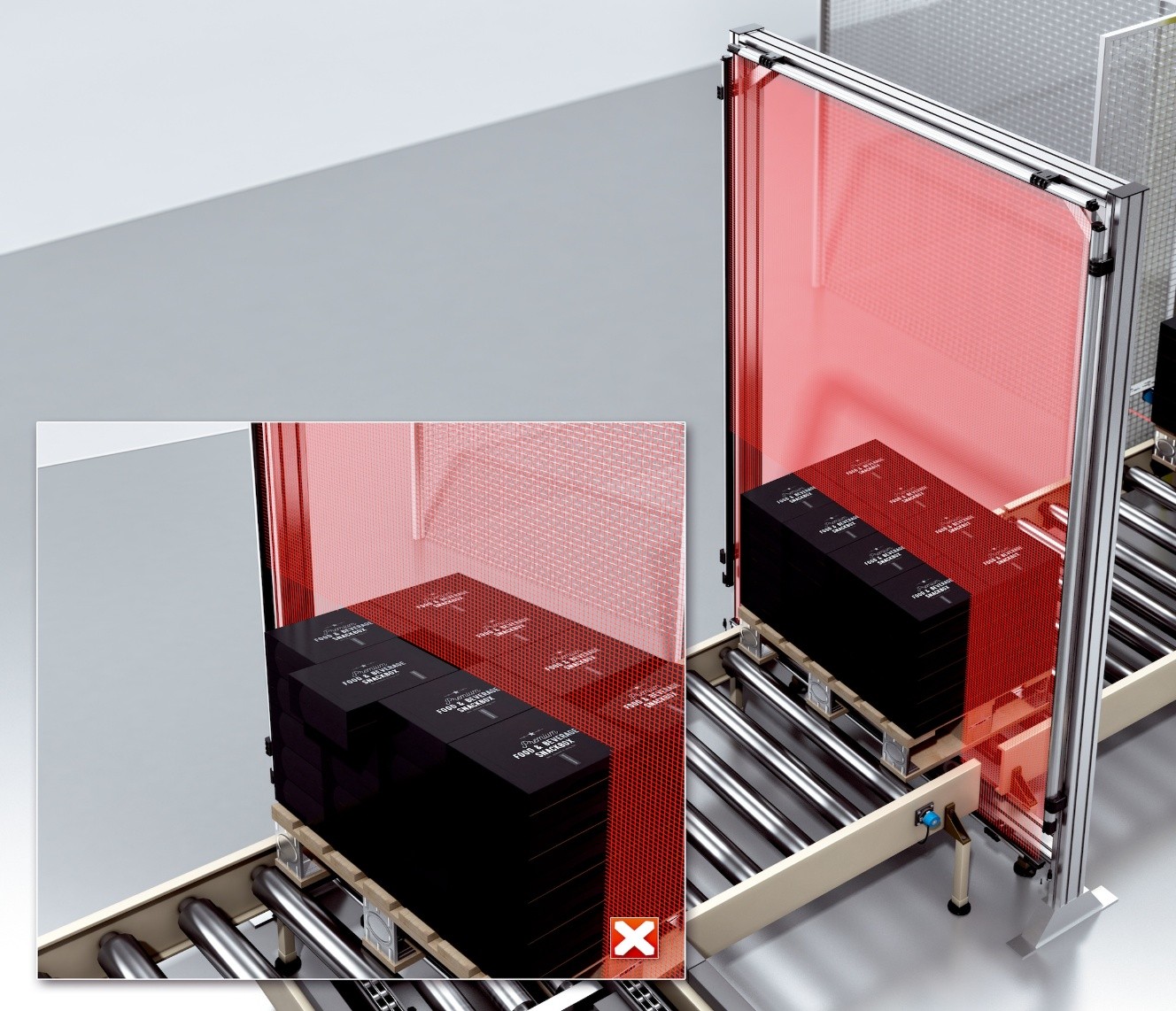
GIẢI PHÁP KIỂM TRA PHẦN NHÔ RA TRÊN PALLET
GIẢI PHÁP KIỂM TRA PHẦN NHÔ RA TRÊN PALLET (PROTRUSION MONITORING AT PALLETS) Trong dây
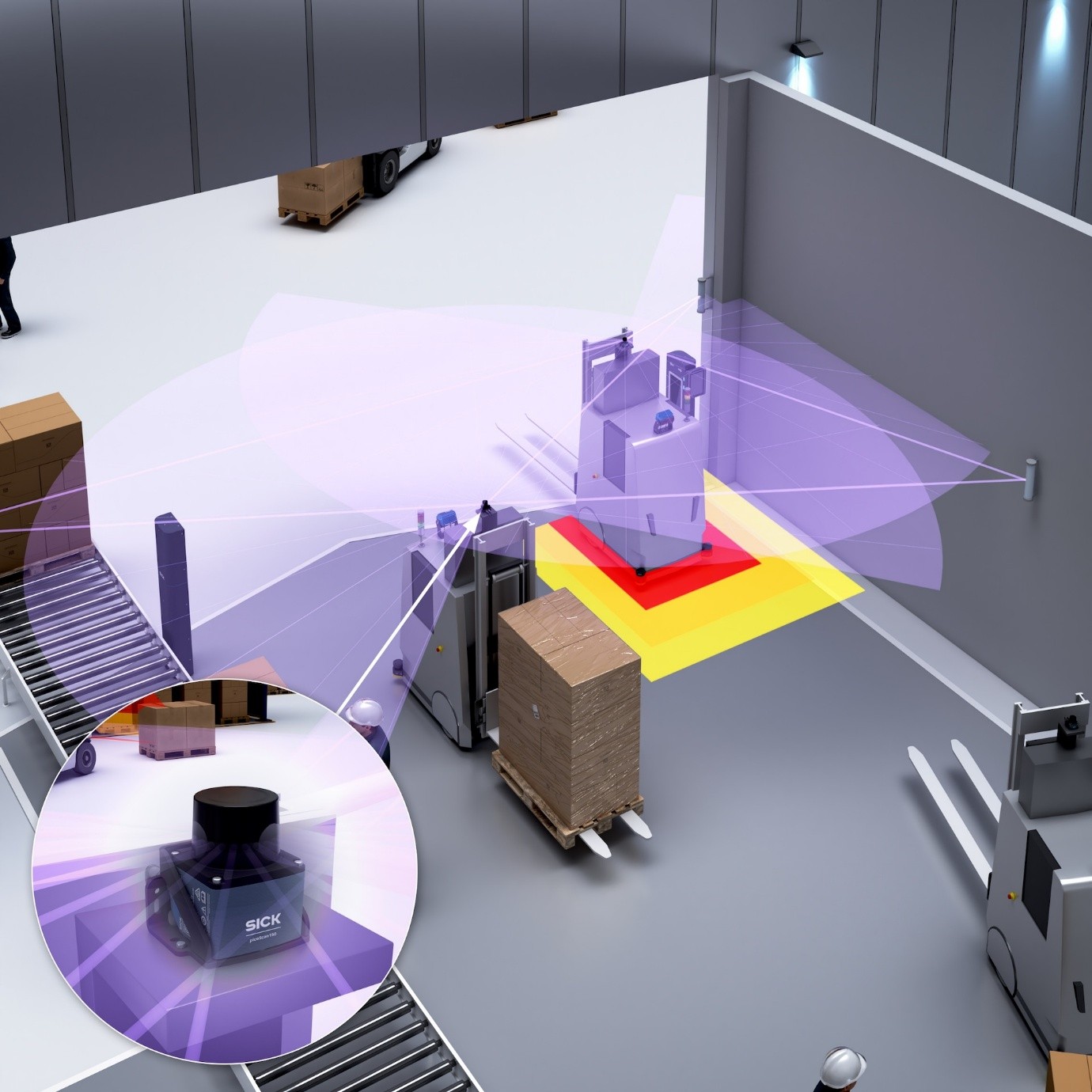
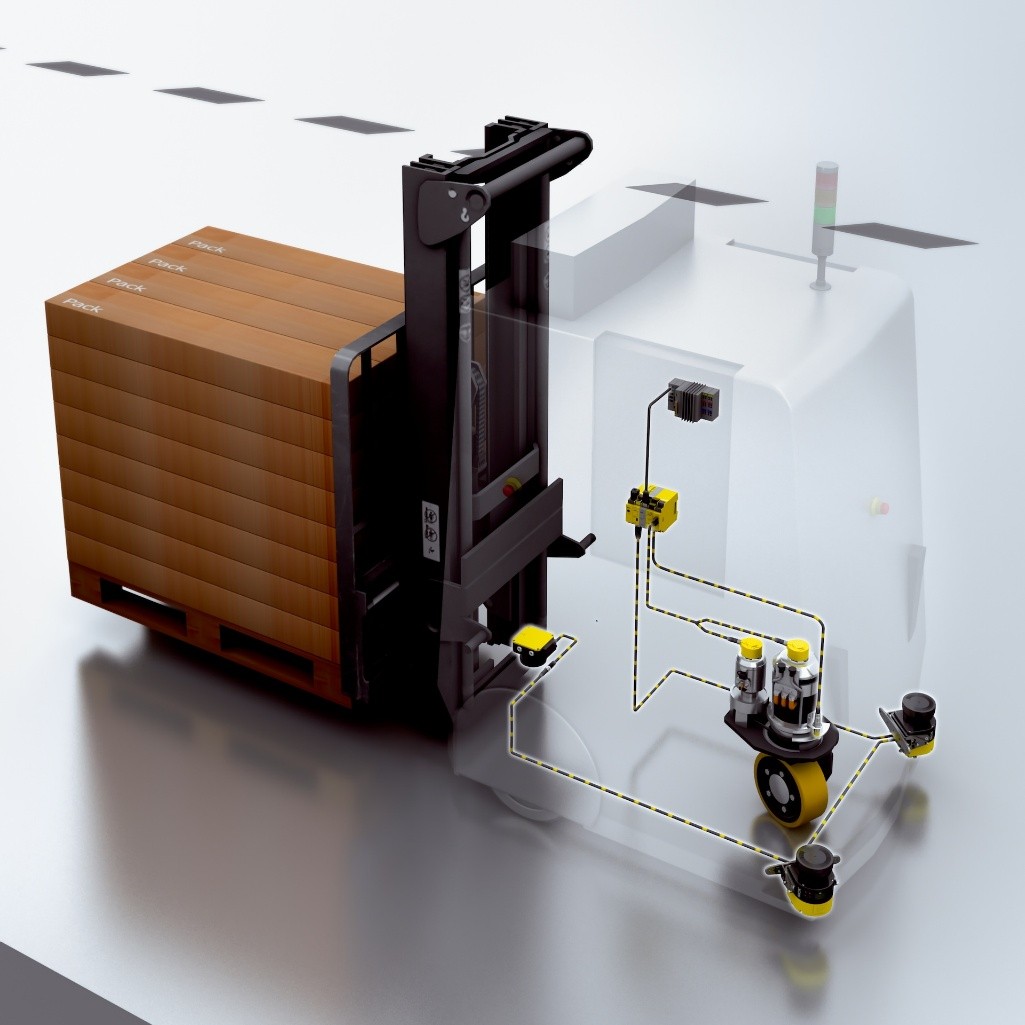
GIẢI PHÁP ĐIỀU HƯỚNG TRONG KHO HÀNG VỚI NAVIGATION SCANNER
GIẢI PHÁP ĐIỀU HƯỚNG TRONG KHO HÀNG VỚI NAVIGATION SCANNER Tự động hóa điều hướng

GIẢI PHÁP PHÁT HIỆN KHUYẾT TẬT QUANG HỌC
GIẢI PHÁP PHÁT HIỆN KHUYẾT TẬT QUANG HỌC (SOLUTIONS FOR OPTICAL DEFECT DETECTION) 🎯 Phát

GIẢI PHÁP KIỂM SOÁT CHẤT LƯỢNG TỰ ĐỘNG
GIẢI PHÁP KIỂM SOÁT CHẤT LƯỢNG TỰ ĐỘNG (SOLUTIONS FOR AUTOMATED QUALITY CONTROL) Với mạng
HỆ THỐNG AN TOÀN LINH HOẠT GIÚP AGV SẴN SÀNG CHO CÔNG NGHIỆP 4.0 (I4.0 READY)
HỆ THỐNG AN TOÀN LINH HOẠT GIÚP AGV SẴN SÀNG CHO CÔNG NGHIỆP 4.0 (I4.0

