GIẢI PHÁP POSITION DETERMINATION OF PACKAGING CỦA SICK – XÁC ĐỊNH VỊ TRÍ BAO BÌ CHO ROBOT BẰNG CÔNG NGHỆ 3D BELT PICK
- GIẢI PHÁP GIÁM SÁT AN NINH VÀ PHÁT HIỆN VẬT THỂ TỐC ĐỘ CAO
- CẢM BIẾN LIDAR 3D MULTISCAN100-S – GIẢI PHÁP AN TOÀN CHO ROBOT VÀ XE TỰ HÀNH NGOÀI TRỜI
- GIẢI PHÁP CẢM BIẾN IFM CHO MÁY DẬP KIM LOẠI
- CẢM BIẾN ĐO KHOẢNG CÁCH OD1000 – GIẢI PHÁP TỐI ƯU CHO ĐO LƯỜNG CHÍNH XÁC VÀ ỔN ĐỊNH TRONG SẢN XUẤT
- GIẢI PHÁP BẢO VỆ QUYỀN TRUY CẬP TRÊN ĐƯỜNG DÂY BÁO CHÍ
 |
Thách thức trong xác định vị trí bao bì trên dây chuyền đóng gói tự động
Trong các dây chuyền đóng gói, đặc biệt là đối với túi thực phẩm mềm (sensitive bags) hoặc bao bì sản phẩm tiêu dùng, việc xác định chính xác vị trí để robot gắp là một thách thức lớn. Những loại bao bì này thường có:
- Hình dạng không cố định (irregular shape)
- Màu sắc đa dạng (variable color)
- Độ cao khác nhau (different heights)
- Bề mặt dễ biến dạng khi di chuyển trên băng tải
Điều này khiến các hệ thống 2D truyền thống không thể nhận dạng chính xác góc đặt, vị trí hoặc hướng của túi. Nếu robot gắp sai vị trí, túi có thể bị rách, bị bóp méo, làm hỏng sản phẩm hoặc gây jam trên dây chuyền.
Chính vì vậy, trong môi trường đóng gói hiện đại, các doanh nghiệp đang chuyển sang công nghệ thị giác 3D (3D vision technology) để đạt được độ chính xác cao hơn và tăng tốc độ vận hành dây chuyền.
3D Belt Pick – Giải pháp hoàn chỉnh cho việc xác định vị trí bao bì
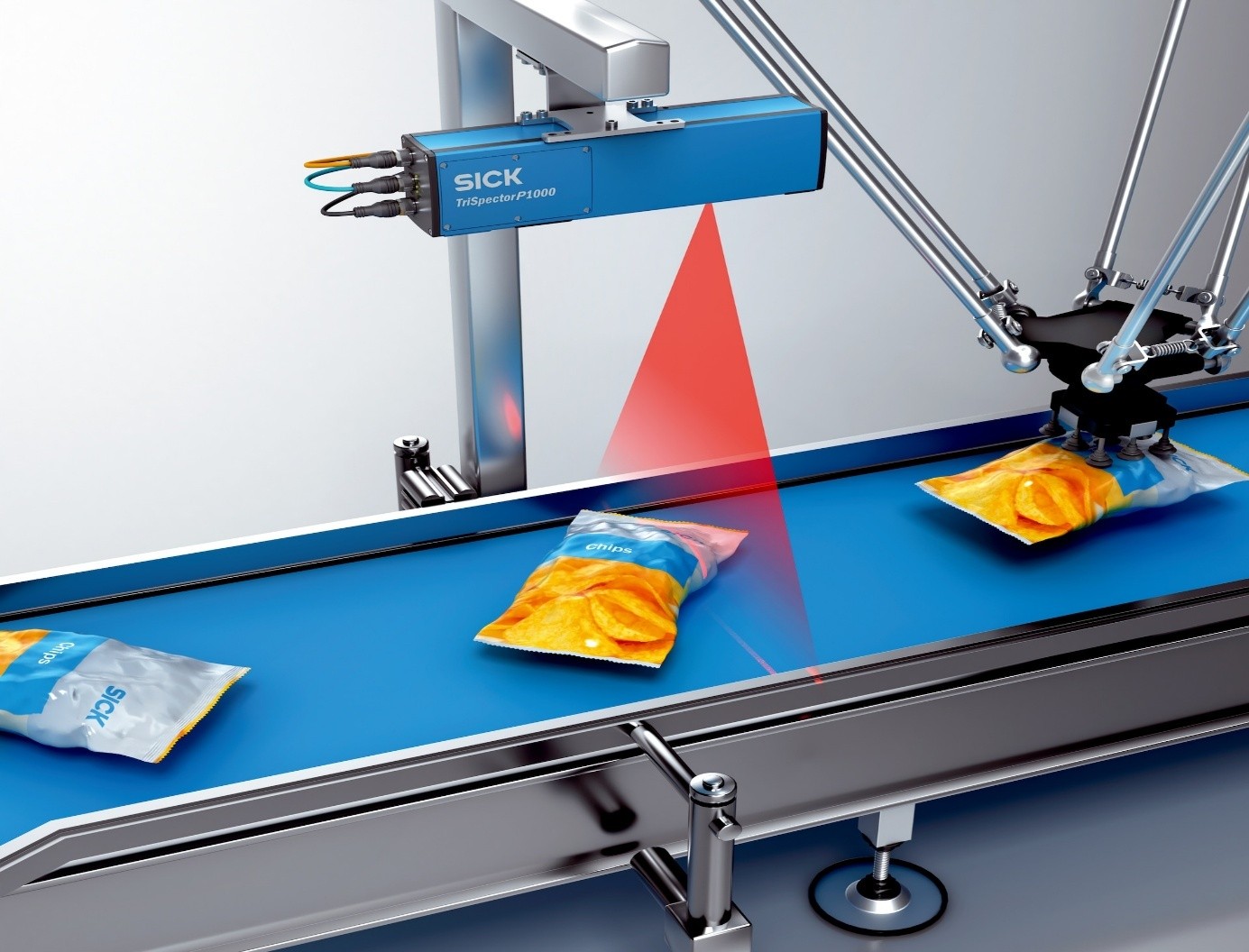
Giải pháp 3D Belt Pick của SICK là hệ thống chuyên dụng giúp robot xác định chính xác vị trí và hướng đặt của từng túi, dựa trên hình dạng thực tế của sản phẩm trên băng tải. Hệ thống bao gồm:
- Camera thị giác 3D TriSpectorP1000 (TriSpectorP1000 3D vision camera)
- Ứng dụng 3D Belt Pick SensorApp
Sự kết hợp này tạo thành một bộ công cụ mạnh mẽ cho robot trong các nhà máy đóng gói với yêu cầu xử lý hàng hóa mềm, dễ biến dạng hoặc không đồng nhất.
TriSpectorP1000 – Cảm biến thị giác 3D tái tạo hình dạng túi theo thời gian thực
Camera TriSpectorP1000 sử dụng công nghệ chiếu sáng cấu trúc (structured light) để tạo ra mô hình 3D chi tiết của từng túi khi di chuyển trên băng tải. Camera thu thập các thông tin quan trọng như:
- Hình dạng thực của túi (real product shape)
- Độ cao và chiều sâu (height & depth information)
- Biên dạng túi (product contour)
- Tọa độ vị trí 3D (3D position coordinates)
Nhờ dữ liệu này, robot không chỉ biết túi đang nằm ở đâu mà còn hiểu rõ túi đang bị lồi, lõm hay nghiêng theo hướng nào.
Đây là yếu tố quyết định giúp robot gắp sản phẩm một cách nhẹ nhàng và chính xác, tránh gây hư hỏng bao bì.
SensorApp 3D Belt Pick – Bộ não phân tích hình dạng cho robot
Ứng dụng 3D Belt Pick SensorApp đóng vai trò là bộ xử lý phân tích toàn bộ dữ liệu 3D từ TriSpectorP1000. Ứng dụng sẽ:
- Tự động nhận diện tâm túi (product centroid)
- Tính toán hướng xoay của túi (orientation)
- Xác định vị trí gắp tối ưu cho robot
- Xử lý hình dạng thực tế của túi để tránh điểm mềm hoặc phần không ổn định
- Truyền thông tin trực tiếp đến robot qua giao diện chuẩn công nghiệp
Không cần lập trình phức tạp, SensorApp hoạt động thông minh và tự động, giúp giảm đáng kể thời gian tích hợp.
Xử lý túi mềm – Robot gắp chính xác dù sản phẩm không đồng nhất
Điểm mạnh nhất của giải pháp 3D Belt Pick chính là khả năng gắp chính xác các loại túi mềm như:
- Túi snack
- Túi gia vị
- Túi nước sốt
- Túi cà phê
- Túi thực phẩm đông lạnh
- Túi bột, nguyên liệu chế biến
- Hàng tiêu dùng đóng gói dạng pouch
Những loại bao bì này thường không cố định hình dạng, khiến chúng thay đổi liên tục trên băng tải.
Nhờ dữ liệu 3D từ TriSpectorP1000, robot luôn biết chính xác điểm nào trên túi là phù hợp nhất để gắp mà không gây biến dạng hoặc rơi vỡ.
Hoạt động ổn định ngay cả khi sản phẩm đa dạng màu sắc và chất liệu
Các hệ thống 2D thường bị ảnh hưởng bởi:
- Màu sắc túi quá tối hoặc quá sáng
- Bao bì in hình phức tạp
- Túi có bề mặt bóng hoặc phản chiếu
- Túi chất liệu mềm, khó cố định
Nhưng với công nghệ 3D, hình dạng mới là yếu tố chính, không bị ảnh hưởng bởi màu sắc hay họa tiết.
Điều này giúp SICK 3D Belt Pick hoạt động ổn định trong mọi điều kiện ánh sáng và mọi loại bao bì.
Giảm lỗi, tăng tốc độ, tối ưu hóa toàn bộ dây chuyền
Khi ứng dụng giải pháp xác định vị trí bao bì bằng 3D Belt Pick của SICK, doanh nghiệp đạt được các lợi ích rõ rệt:
- Giảm tỷ lệ gắp sai – giảm hư hỏng túi
- Tăng tốc độ robot nhờ dữ liệu chính xác
- Giảm jam trên băng tải do robot xử lý sai sản phẩm
- Giảm chi phí nhân công và lỗi do con người
- Tự động hóa hoàn toàn quy trình gắp túi
- Nâng cao chất lượng đóng gói cuối cùng
Đối với dây chuyền đóng gói quy mô lớn, giải pháp này mang lại hiệu quả vượt trội trong việc duy trì năng suất cao và giảm giá thành sản xuất.
Ứng dụng rộng rãi trong các nhà máy đóng gói bao bì
Giải pháp này thích hợp cho nhiều ngành:
- Thực phẩm – snack – gia vị
- Thủy sản – thịt – sản phẩm đông lạnh
- Đồ uống dạng pouch
- Đồ gia dụng – mỹ phẩm
- Ngành dược – sản phẩm tiêu dùng đóng gói mềm
- Các dây chuyền xuất khẩu cần tiêu chuẩn đóng gói cao
Nhờ tính linh hoạt, hệ thống dễ dàng tích hợp vào robot công nghiệp, robot delta, robot SCARA và các hệ thống pick-and-place tốc độ cao.
Kết luận – Công nghệ xác định vị trí bao bì 3D giúp robot làm việc thông minh hơn
Giải pháp Position Determination of Packaging từ SICK, với sự kết hợp giữa camera 3D TriSpectorP1000 và SensorApp 3D Belt Pick, mang lại độ chính xác vượt trội trong xử lý bao bì dạng túi. Robot có thể gắp túi một cách nhẹ nhàng, dựa trên hình dạng thực của sản phẩm, đảm bảo không làm hỏng bao bì, đồng thời tăng tốc độ và độ ổn định của toàn bộ dây chuyền đóng gói.
Đây là công nghệ lý tưởng cho doanh nghiệp muốn nâng cấp quy trình gắp – đặt bằng robot, hướng đến tự động hóa thông minh và nâng tiêu chuẩn đóng gói lên một tầm cao mới.
Trích nguồn:
Xem thêm các sản phẩm của Sick tại đây.

