Nhận thức về an toàn và môi trường cho robot di động
1. Tổng quan
Khi robot di động ngày càng phổ biến trong các lĩnh vực như sản xuất, logistics, y tế và bán lẻ, một yếu tố không thể thiếu để đảm bảo sự vận hành hiệu quả và bền vững chính là nhận thức về an toàn và môi trường. Một robot không chỉ cần biết nó đang ở đâu (định vị), đi như thế nào (điều hướng), mà còn phải hiểu những gì đang diễn ra xung quanh để hành xử một cách an toàn, thông minh và linh hoạt.
- GIẢI PHÁP GIÁM SÁT AN NINH VÀ PHÁT HIỆN VẬT THỂ TỐC ĐỘ CAO
- CẢM BIẾN LIDAR 3D MULTISCAN100-S – GIẢI PHÁP AN TOÀN CHO ROBOT VÀ XE TỰ HÀNH NGOÀI TRỜI
- GIẢI PHÁP CẢM BIẾN IFM CHO MÁY DẬP KIM LOẠI
- CẢM BIẾN ĐO KHOẢNG CÁCH OD1000 – GIẢI PHÁP TỐI ƯU CHO ĐO LƯỜNG CHÍNH XÁC VÀ ỔN ĐỊNH TRONG SẢN XUẤT
- GIẢI PHÁP BẢO VỆ QUYỀN TRUY CẬP TRÊN ĐƯỜNG DÂY BÁO CHÍ
Khái niệm “an toàn” không chỉ giới hạn ở việc tránh va chạm, mà còn bao gồm bảo vệ con người, hàng hóa, thiết bị, tuân thủ quy chuẩn an toàn máy móc, và thậm chí cả khả năng phản ứng với những rủi ro bất ngờ như vật cản động, sự thay đổi môi trường hay lỗi hệ thống.
2. Các mối nguy và yêu cầu an toàn điển hình

2.1. Mối nguy từ chuyển động
Robot di chuyển trong khu vực có người luôn tiềm ẩn rủi ro va chạm. Tốc độ di chuyển, khả năng dừng khẩn cấp, nhận diện góc mù, vùng quay hẹp… đều cần được giám sát nghiêm ngặt.
2.2. Môi trường không cố định
Không gian làm việc của robot thường xuyên thay đổi: người di chuyển, pallet xuất hiện bất ngờ, thang máy đóng mở, thiết bị hoạt động gần kề, thậm chí ánh sáng thay đổi hoặc sàn bị ẩm ướt. Những yếu tố này ảnh hưởng lớn đến khả năng nhận thức môi trường của robot.
2.3. Tuân thủ tiêu chuẩn an toàn
Các tiêu chuẩn quốc tế như ISO 3691-4, ISO 13849, IEC 61508 hay PL (Performance Level) và SIL (Safety Integrity Level) đặt ra những yêu cầu bắt buộc về an toàn cho hệ thống robot tự hành, đặc biệt khi hoạt động cùng con người (cobot, AMR).
3. Giải pháp cảm biến để đảm bảo an toàn và nhận thức môi trường
3.1. Safety Laser Scanner
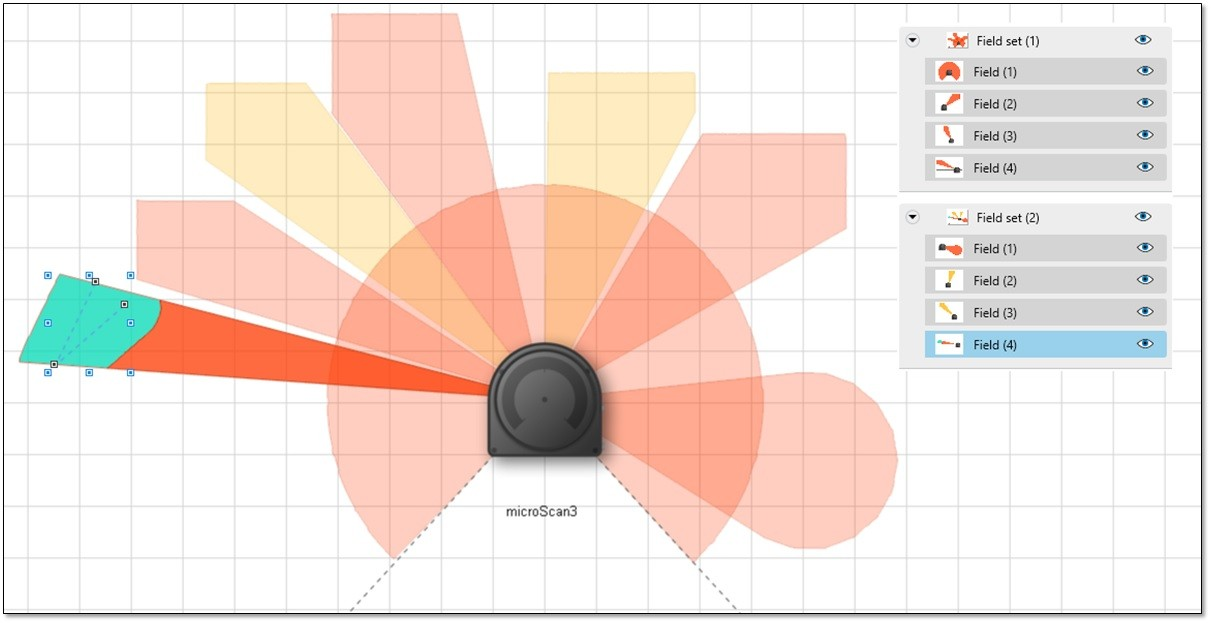
Đây là thiết bị phổ biến nhất để đảm bảo an toàn cho robot di động. Các cảm biến này phát ra tia laser để giám sát vùng không gian theo hình quạt 2D phía trước hoặc xung quanh robot. Khi phát hiện người hoặc vật thể trong vùng nguy hiểm, robot sẽ tự động giảm tốc hoặc dừng lại hoàn toàn.
Một số dòng cảm biến nổi bật:
- nanoScan3: thiết kế cực kỳ nhỏ gọn, thích hợp cho robot có không gian lắp đặt hạn chế.
- microScan3: dành cho môi trường công nghiệp, phạm vi quét rộng, độ chính xác cao.
- TiM5xx/TiM7xx: vừa hỗ trợ an toàn, vừa phục vụ điều hướng nhờ khả năng cung cấp dữ liệu bản đồ.
Các scanner này thường cho phép lập trình nhiều vùng giám sát khác nhau tương ứng với tốc độ di chuyển (zone switching).
3.2. Camera 3D ToF an toàn – safeVisionary2

Khác với laser scanner chỉ phát hiện vật thể trong mặt phẳng 2D, camera 3D ToF (Time-of-Flight) cho phép robot có nhận thức 3 chiều về môi trường. Đây là bước tiến quan trọng để phát hiện các vật thể ở tầng cao hơn mặt đất, ví dụ như cánh tay người, thanh kệ nhô ra, cần cẩu, thùng treo, hoặc cửa trượt.
safeVisionary2 là một trong những camera đầu tiên đạt cấp an toàn PL c theo tiêu chuẩn ISO 13849. Nó có thể tạo ra vùng bảo vệ 3D, giúp robot phản ứng trước các mối đe dọa từ trên cao mà laser scanner không thể thấy được.
3.3. Cảm biến khoảng cách và siêu âm
Đây là lớp cảm biến hỗ trợ, giúp robot nhận diện vật thể trong vùng gần mà laser hoặc camera khó tiếp cận do góc chết, ví dụ như:
- Mép tường, gầm kệ, chân bàn ghế
- Hộp hàng rơi dưới đất
- Các đối tượng có bề mặt hấp thụ ánh sáng laser (vải tối màu, nhung…)
Chúng thường được lắp quanh khung robot để xử lý các tình huống gần kề như dừng khẩn cấp hoặc tránh va chạm tốc độ thấp.
3.4. Cảm biến mép rơi (Cliff detection)
Trong các môi trường có nguy cơ rơi như tầng cao, cầu thang, nền sàn có khoảng hở, robot cần cảm biến mép rơi để phát hiện và dừng lại kịp thời. Một số giải pháp sử dụng laser hướng xuống, số khác dùng hồng ngoại hoặc siêu âm để nhận diện khoảng trống.
3.5. IMU và cảm biến nghiêng

Để đảm bảo an toàn vận chuyển khi mang hàng hóa cao hoặc nặng, robot cần kiểm soát độ nghiêng, rung lắc và độ lệch khi vượt qua sàn không phẳng. Các cảm biến IMU (Inertial Measurement Unit) tích hợp gia tốc kế và con quay hồi chuyển giúp robot đánh giá trạng thái chuyển động và cân bằng tải trọng.
4. Phân lớp vùng an toàn và phản ứng
4.1. Vùng an toàn linh hoạt theo tốc độ
Robot hiện đại cho phép cấu hình vùng quét theo tốc độ di chuyển: càng chạy nhanh, vùng dừng khẩn cấp càng mở rộng. Khi giảm tốc, vùng nguy hiểm cũng thu hẹp lại. Đây là cơ chế vùng an toàn động, giúp robot di chuyển hiệu quả nhưng vẫn an toàn.
4.2. Vùng an toàn theo hướng quay
Khi robot rẽ trái hoặc phải, các vùng bên sườn cần mở rộng để kiểm soát không gian quay. Scanner sẽ kích hoạt phản ứng dừng nếu có người hoặc vật thể lọt vào vùng nguy hiểm bên cạnh.
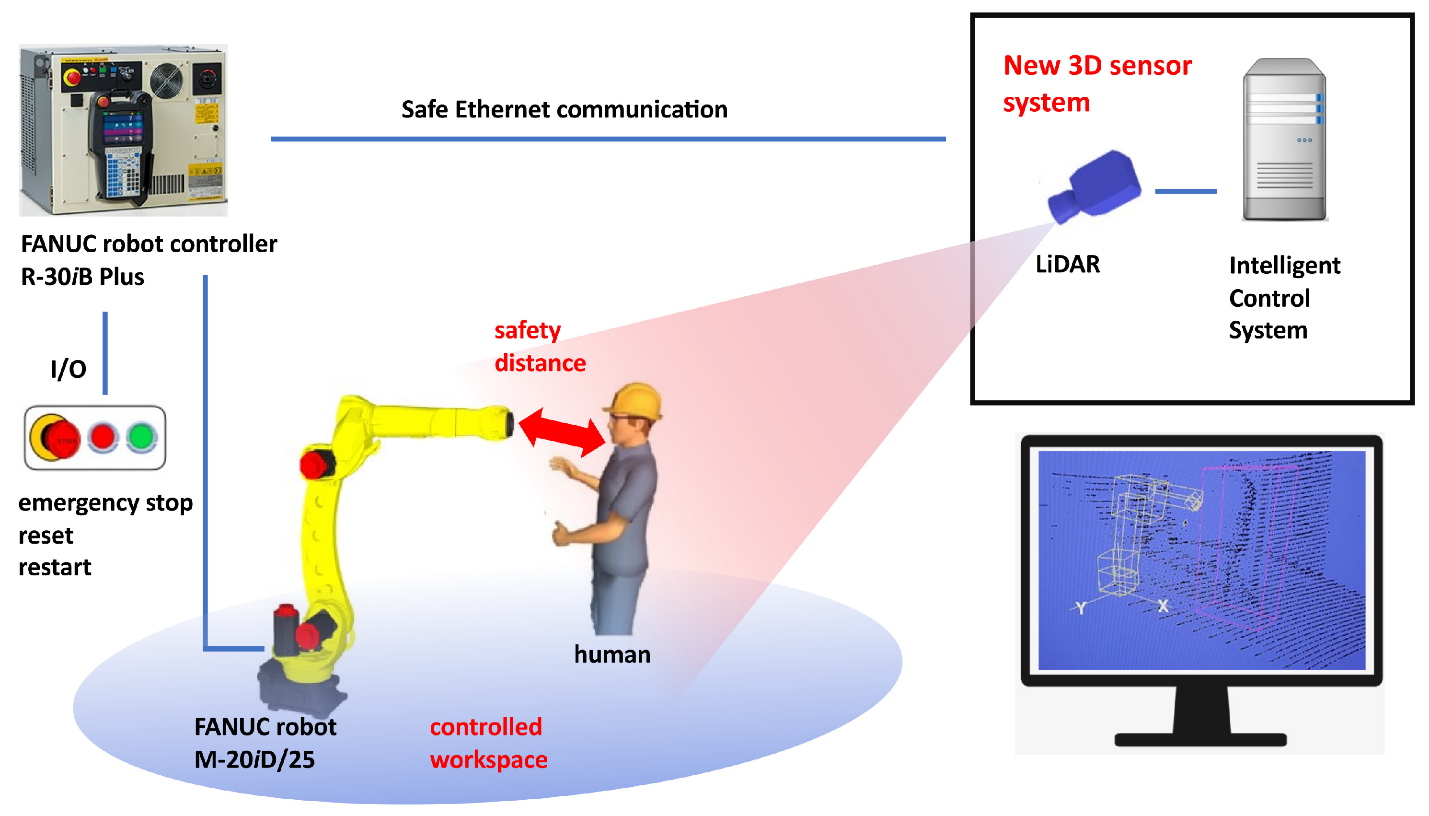
4.3. Phát hiện chướng ngại vật động
Sử dụng cảm biến thông minh như LiDAR hoặc camera AI để nhận diện không chỉ vật thể tĩnh mà còn cả các đối tượng đang chuyển động như người đi bộ, xe đẩy, robot khác. Điều này giúp hệ thống phản ứng thông minh hơn thay vì chỉ dừng máy khi gặp bất kỳ vật cản nào.
5. Vai trò của phần mềm & tiêu chuẩn an toàn
5.1. Phân tích rủi ro
Trước khi triển khai hệ thống robot di động, cần thực hiện phân tích rủi ro chi tiết để xác định các tình huống nguy hiểm tiềm ẩn và thiết lập các biện pháp phòng ngừa thông qua cảm biến.
5.2. Giám sát thời gian thực
Các phần mềm điều khiển trung tâm thường tích hợp khả năng theo dõi thời gian thực vị trí robot, trạng thái cảm biến, báo động an toàn, vùng bị cản trở… giúp người vận hành can thiệp kịp thời khi có sự cố.
5.3. Giao tiếp với hạ tầng
Cảm biến an toàn cần được đồng bộ với hệ thống cửa tự động, thang máy, băng tải hoặc đèn báo trong môi trường làm việc để đảm bảo robot tương tác đúng lúc và không gây gián đoạn.
6. Ứng dụng thực tế
a) Robot di động trong nhà máy lắp ráp

Một nhà máy xe hơi sử dụng hệ thống robot vận chuyển linh kiện giữa các khu vực. Hệ thống được trang bị laser scanner 360°, camera 3D an toàn, và cảm biến siêu âm để tránh va chạm với công nhân, tự động giảm tốc khi đi qua khu vực đông người và dừng khi có tín hiệu nguy hiểm.
b) Robot dịch vụ trong bệnh viện
Robot chở thuốc men giữa các khoa bệnh viện được trang bị camera 3D để tránh cửa đang đóng, tránh va chạm với giường bệnh và tự động chuyển chế độ dừng khẩn cấp khi phát hiện trẻ em đứng gần.
c) Trung tâm phân phối hàng hóa
Các AMR vận hành trong kho kết hợp multi-sensor để duy trì khoảng cách an toàn giữa các robot, tự tránh pallet đặt lệch, cảnh báo khi sàn có độ nghiêng quá mức hoặc gặp chướng ngại vật bất thường.
7. Tương lai của cảm biến an toàn
Các xu hướng đang phát triển:
- Sensor AI tích hợp học máy: giúp robot phân biệt người, vật thể, hoặc trạng thái di chuyển để phản ứng phù hợp hơn.
- Cảm biến có khả năng học hành vi môi trường: phân biệt các tình huống bất thường như thùng hàng bị ngã, cửa mở không đúng lúc…
- Chuẩn hóa giao tiếp: cảm biến sẽ tích hợp tốt hơn với các chuẩn an toàn và giao thức mạng để đồng bộ hệ thống điều khiển.
8. Kết luận
An toàn và nhận thức môi trường không còn là phần phụ trong hệ thống robot di động – đó là yêu cầu bắt buộc để đảm bảo tính bền vững, linh hoạt, và chấp nhận của con người đối với tự động hóa thông minh.
Việc tích hợp cảm biến an toàn không chỉ bảo vệ tài sản, con người, mà còn góp phần nâng cao hiệu suất hoạt động nhờ giảm thiểu thời gian chết, sự cố và chi phí sửa chữa.
Các giải pháp từ nhà cung cấp như SICK, bao gồm laser scanner an toàn, camera 3D, cảm biến siêu âm, cliff detection, và phần mềm xử lý đóng vai trò thiết yếu giúp doanh nghiệp thiết kế robot di động an toàn, thông minh và sẵn sàng cho tương lai.
Nguồn: https://www.sick.com/sg/en/
Xem thêm các sản phẩm của Sick tại đây.

