ĐỊNH VỊ VÀ ĐIỀU HƯỚNG (LOCALIZATION & NAVIGATION)
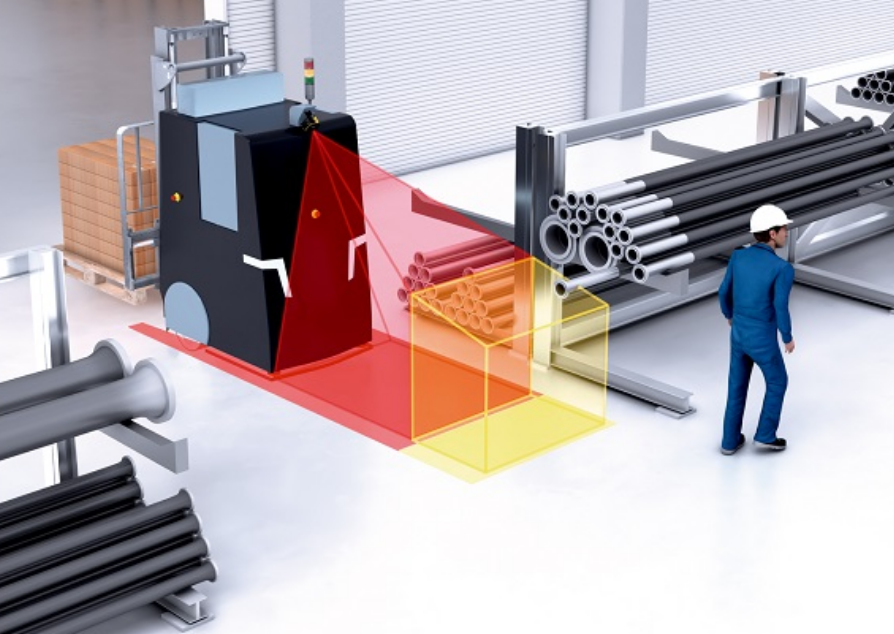
- GIẢI PHÁP GIÁM SÁT AN NINH VÀ PHÁT HIỆN VẬT THỂ TỐC ĐỘ CAO
- CẢM BIẾN LIDAR 3D MULTISCAN100-S – GIẢI PHÁP AN TOÀN CHO ROBOT VÀ XE TỰ HÀNH NGOÀI TRỜI
- GIẢI PHÁP CẢM BIẾN IFM CHO MÁY DẬP KIM LOẠI
- CẢM BIẾN ĐO KHOẢNG CÁCH OD1000 – GIẢI PHÁP TỐI ƯU CHO ĐO LƯỜNG CHÍNH XÁC VÀ ỔN ĐỊNH TRONG SẢN XUẤT
- GIẢI PHÁP BẢO VỆ QUYỀN TRUY CẬP TRÊN ĐƯỜNG DÂY BÁO CHÍ
1.Tổng quan ĐỊNH VỊ VÀ ĐIỀU HƯỚNG
Trong lĩnh vực robot di động, đặc biệt là các hệ thống như AGV (Automated Guided Vehicle) và AMR (Autonomous Mobile Robot), khả năng định vị và điều hướng đóng vai trò trung tâm. Không chỉ giúp robot nhận biết vị trí của mình trong môi trường, các giải pháp này còn đảm bảo robot có thể tự chủ trong việc tìm đường, tránh chướng ngại vật, tối ưu hóa di chuyển và nâng cao độ tin cậy trong vận hành.
Sự phát triển của các cảm biến công nghiệp, đặc biệt là từ các hãng tiên phong như SICK đã cho phép tích hợp nhiều công nghệ định vị thông minh, an toàn và chính xác, phục vụ đa dạng môi trường ứng dụng từ nhà máy, kho vận, bệnh viện, trung tâm thương mại, đến cả ngành bán lẻ và logistics.
2.Các phương pháp định vị và điều hướng
2.1. Dẫn đường theo vạch (Line Guidance)
a) Dẫn đường quang học (Optical Line)
Robot sử dụng cảm biến quang học để nhận diện dải băng dính màu (thường là màu đen hoặc phản quang) được dán trên mặt sàn. Cảm biến sẽ liên tục phát hiện vạch dẫn đường này để duy trì quỹ đạo di chuyển. Giải pháp này đơn giản, chi phí thấp và dễ triển khai, đặc biệt trong các nhà máy truyền thống.
b) Dẫn đường từ tính (Magnetic Line)
Thay vì băng màu, robot sử dụng các cảm biến từ tính để phát hiện dải từ được gắn âm dưới sàn. Phương pháp này ít bị ảnh hưởng bởi bụi bẩn, ánh sáng hoặc sự mài mòn cơ học. Nó phù hợp cho môi trường khắc nghiệt như nhà máy thép, hóa chất, hoặc các khu vực nhiều bụi.
2.2. Định vị theo mã lưới (Grid Localization)
Trong phương pháp này, mặt sàn sẽ được gắn các mã QR hoặc Data Matrix tại các điểm cố định theo dạng lưới. Cảm biến trên robot đọc các mã này để xác định vị trí tuyệt đối của nó trong không gian. Đây là một giải pháp ổn định và chính xác, rất hiệu quả trong môi trường kho vận có tổ chức rõ ràng.
2.3. Định vị theo biên dạng môi trường (Contour-based Localization)
Sử dụng các cảm biến LiDAR 2D hoặc laser scanner, robot sẽ quét không gian xung quanh để nhận diện biên dạng tường, kệ, trụ, vật thể cố định. Những dữ liệu này được so sánh với bản đồ đã lưu trước đó, cho phép robot xác định chính xác vị trí hiện tại của mình mà không cần bất kỳ dải dẫn đường vật lý nào.
Đây là giải pháp linh hoạt, dễ mở rộng, đặc biệt hữu ích cho các hệ thống AMR hiện đại hoạt động trong môi trường thay đổi liên tục.
2.4. Định vị và tạo bản đồ đồng thời (SLAM)
SLAM (Simultaneous Localization and Mapping) là công nghệ cho phép robot vừa xác định vị trí của mình, vừa xây dựng bản đồ môi trường mới trong thời gian thực. Đây là giải pháp tối ưu cho môi trường động, nơi robot có thể được triển khai lần đầu mà chưa có sẵn bản đồ.
SLAM thường sử dụng cảm biến LiDAR 3D, camera stereo, IMU (Inertial Measurement Unit) và các bộ xử lý mạnh. Một số dòng cảm biến hiện đại cho phép xử lý SLAM ngay trên thiết bị mà không cần bộ xử lý bên ngoài.
2.5. Điều hướng theo thuật toán (Navigation Algorithms)
Khi đã có thông tin định vị, hệ thống điều hướng sử dụng các thuật toán như A*, Dijkstra, DWA (Dynamic Window Approach), hoặc Hybrid A*/SLAM để tính toán lộ trình tối ưu, tránh chướng ngại vật, cập nhật lại đường đi khi môi trường thay đổi.
Robot thường kết hợp các lớp định vị với cảm biến siêu âm, camera, radar, hoặc cảm biến độ sâu để hoàn thiện khả năng nhận thức không gian và ra quyết định di chuyển.
3.So sánh các giải pháp Định Vị Và Điều Hướng
| Phương pháp | Ưu điểm | Nhược điểm |
| Dẫn đường quang học | Rẻ, dễ lắp đặt | Không linh hoạt, dễ bị mòn/bụi che khuất |
| Dẫn đường từ tính | Ổn định trong môi trường bẩn/nhiễu sáng | Cần thay đổi hạ tầng nếu đổi đường đi |
| Mã lưới (Grid Code) | Xác định vị trí tuyệt đối, chính xác | Cần gắn mã dày đặc, khó dùng nơi đông người |
| Contour-based | Không cần thay đổi hạ tầng, linh hoạt | Cần có bản đồ chi tiết môi trường |
| SLAM | Tự động khám phá, làm việc môi trường mới | Đòi hỏi phần cứng mạnh, phức tạp hơn |
4.Các sản phẩm cảm biến tiêu biểu từ SICK
4.1. Cảm biến LiDAR 2D – NAV310 / NAV245
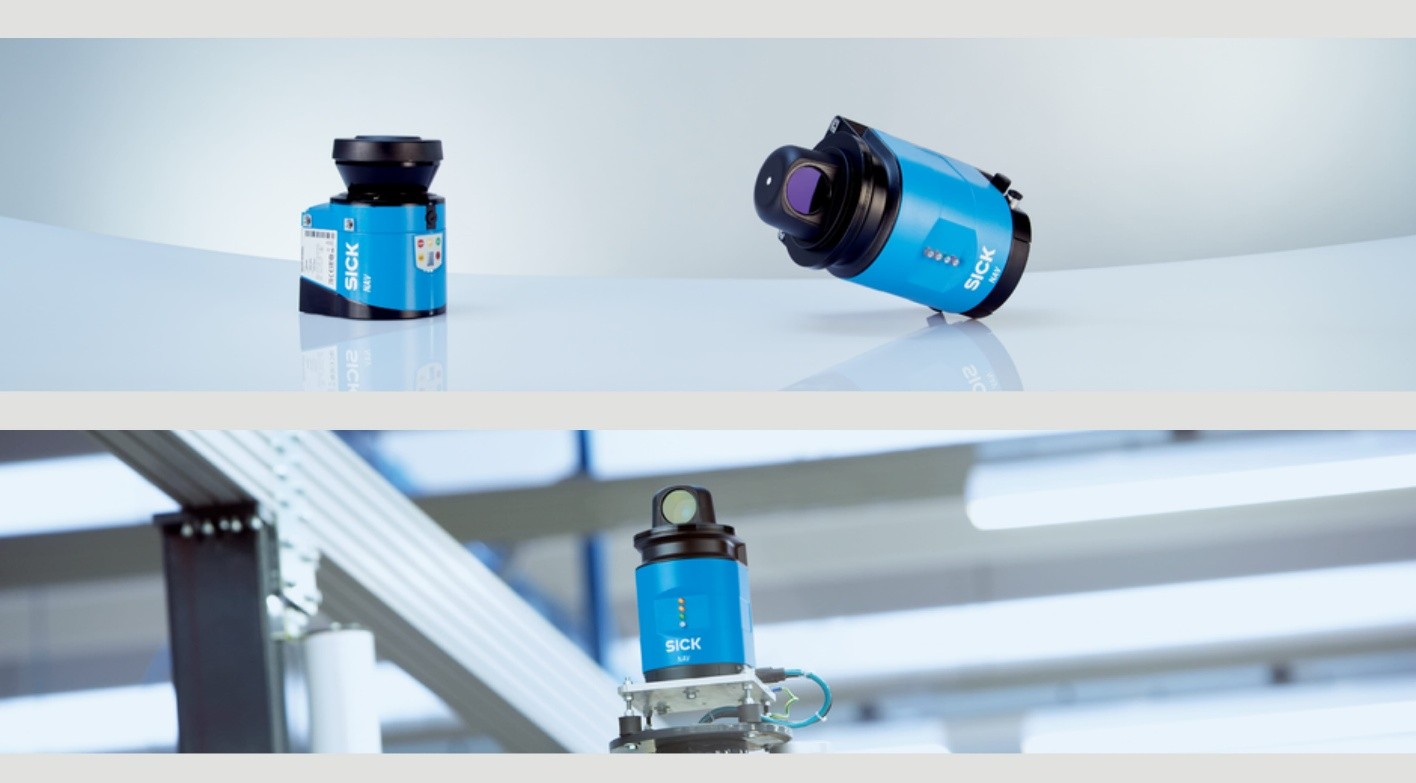
Dòng cảm biến chuyên cho định vị contour-based có khả năng so sánh hình dạng không gian thực với bản đồ tham chiếu để xác định vị trí tuyệt đối, và được tích hợp module xử lý SIM2000.
4.2. Cảm biến LiDAR 3D – multiScan100 / multiScan136

Cung cấp góc nhìn toàn cảnh 360 độ theo chiều ngang và dọc, cho phép thu thập hàng trăm nghìn điểm dữ liệu môi trường mỗi giây, hỗ trợ SLAM, nhận diện mép rơi, lỗ hổng, vật cản ở các tầng cao.
4.3. Laser Scanner an toàn – nanoScan3, microScan3, TiM7xx

Kết hợp giữa bảo vệ vùng nguy hiểm và hỗ trợ điều hướng nhờ phát hiện vật thể 2D, được dùng phổ biến trong các hệ thống robot kho vận và robot dịch vụ.
4.4. Camera an toàn 3D – safeVisionary2

Công nghệ Time-of-Flight giúp robot nhận diện được các vật thể vượt ra ngoài vùng quét laser (như kệ treo cao, cần cẩu, cửa tự động…), đảm bảo an toàn 3D cho robot trong khu vực vận hành.
5.Ứng dụng thực tế Định Vị Và Điều Hướng
a) Kho thông minh – Logistics
Một công ty logistics sử dụng hệ thống AMR với LiDAR 3D và công nghệ SLAM để tự động vận chuyển hàng hóa giữa các khu vực lưu trữ, hệ thống không yêu cầu sửa đổi sàn, giúp tiết kiệm thời gian triển khai.
b) Nhà máy sản xuất

Robot AGV nâng cấp từ hệ thống dẫn đường từ tính sang định vị contour bằng NAV310, cho phép vận hành linh hoạt giữa các khu vực sản xuất, tránh ùn tắc và thích nghi với sự thay đổi dây chuyền.
c) Bệnh viện, trung tâm thương mại
Robot dịch vụ dùng nanoScan3 để di chuyển an toàn giữa đám đông, kết hợp với camera 3D để tránh các vật thể ở trên cao như bảng chỉ dẫn hoặc cửa mở trượt.
6.Tích hợp & nâng cao
a) Sensor Fusion
Nhiều hệ thống tiên tiến hiện nay sử dụng sự kết hợp giữa các cảm biến: LiDAR + IMU + camera + encoder để tăng độ chính xác định vị, hỗ trợ robot làm việc trong điều kiện thiếu ánh sáng, nhiễu điện từ hoặc mặt sàn không đồng đều.
b) Phần mềm điều hướng
Các bộ phần mềm như ROS (Robot Operating System) hoặc phần mềm độc quyền từ các nhà cung cấp cảm biến cho phép tích hợp, xử lý bản đồ, lập kế hoạch đường đi và phản ứng linh hoạt theo tình huống.
7.Kết luận
Giải pháp định vị và điều hướng là yếu tố then chốt trong việc phát triển robot di động thông minh. Tùy theo môi trường, yêu cầu vận hành và ngân sách, người dùng có thể chọn từ các công nghệ dẫn đường vật lý đơn giản đến các giải pháp SLAM tiên tiến tích hợp cảm biến 3D.
SICK – với hệ sinh thái cảm biến đa dạng từ LiDAR 2D/3D, camera 3D an toàn, cảm biến quang học đến các phần mềm định vị chuyên dụng – là đối tác hàng đầu giúp các doanh nghiệp hiện thực hóa mục tiêu tự động hóa di động an toàn, hiệu quả và linh hoạt.
Nguồn: https://www.sick.com/sg/en/
Xem thêm các sản phẩm của Sick tại đây.

